注意包装盒的右侧、水壶的把手以及右侧和地面接近部分的点云在rgbd对齐前后可看出较大区别。求解深度相机到彩色相机的变换矩阵的原理:(参考。第二步:求解深度相机到彩色相机的变换矩阵。第一步:标定彩色相机和...
”相机标定 深度对齐 rgbd“ 的搜索结果
对应博文https://blog.csdn.net/taifyang/article/details/131030025

相机自带的D2C效果不好,颜色和点云没有很好地匹配上,自己按照下面的介绍手动匹配一下。


本文作者蔡量力,公众号:计算机视觉life成员,由于格式原因,公式显示可能出问题,建议阅读原文链接:综述 | 相机标定方法另外推荐几个原创的号 计算机视觉,Python,自然语言处理、数据挖掘相关,汇总最新资源,...

拷贝到你的ubuntu的一个文件夹中,并解压得到 ros2_astra_camera 文件夹然后新建一个ros2_ws文件夹,再在ros2_ws文件夹中新建src文件夹,然后复制 ros2_astra_camera文件夹里面的astra_camera、astra_camera_msg两个...

相比于上一篇文章,这里我们将官方给的 rosbag 数据包替换为来自深度相机的实时数据。之所以选择 Intel RealSense 这款深度相机,仅仅是因为它是最容易买到的。。。在京东上搜“深度相机”,符合要求的几乎都是这个...









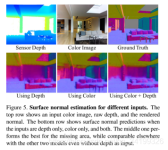
这是一种集成方法,用于将颜色和深度(RGBD)传感器校准和配准到共同坐标系中,而无需明确识别相机的内外参数。 该方法采用棋盘格追踪,在彩色和深度相机空间以及世界空间中建立多个位置之间的对应关系。 使用这些...

相比于上一篇文章,这里我们将官方给的 rosbag 数据包替换为来自深度相机的实时数据。之所以选择 Intel RealSense 这款深度相机,仅仅是因为它是最容易买到的。。。在京东上搜“深度相机”,符合要求的几乎都是这个...
由RGB-D图像获取三维坐标(相机坐标) Python由RGB-D图像获取三维坐标(相机坐标) Python图像数据获取相机坐标(本处是在深度摄像头下)相信大家最感兴趣的...原始深度图(单通道)+RGB图像(需要与深度图对齐,目的保

推荐文章
- Android RIL框架分析-程序员宅基地
- Python编程基础:第六节 math包的基础使用Math Functions_ps math function-程序员宅基地
- canal异常 Could not find first log file name in binary log index file_canal could not find first log file name in binary-程序员宅基地
- 【练习】生成10个1到20之间的不重复的随机数并降序输出-程序员宅基地
- linux系统扩展名大全,Linux系统文件扩展名学习-程序员宅基地
- WPF TabControl 滚动选项卡_wpf 使用tabcontrol如何给切换的页面增加滚动条-程序员宅基地
- Apache Jmeter常用插件下载及安装及软硬件性能指标_jmeter插件下载-程序员宅基地
- SpringBoot 2.X整合Mybatis_springboot2.1.5整合mybatis不需要配置mapper-locations-程序员宅基地
- ios刷android8.0,颤抖吧 iOS, Android 8.0正式发布!-程序员宅基地
- 【halcon】C# halcon 内存暴增_halcon 读二维码占内存-程序员宅基地